4 民生及び産業用途向けのレーダーセンサの実装
4.1 レーダーセンサの基本構成図
本章で論じるすべてのレーダー方式は、レーダーフロントエンドに対する比較的シンプルかつ古典的なアプローチで実現可能です。
受信部は、受信信号を中間周波数(IF)“ゼロ”あるいはゼロに近い周波数までダウンコンバートします。従来のスーパーヘテロダイン受信機のように、受信信号を数十MHz程度の中間周波数に変換する技術は本アプローチには使用されていません。
いわゆるダイレクトコンバージョン方式(またはホモダイン型)と呼ぶこの手法は原理上ダイナミックレンジに限界があります。(これは比較的高い1/f(キャリア近傍)ノイズのためです)。しかし、実装に関しては複雑なソリューションによる実現性とコストパフォーマンスの良い単純化されたアプローチとにおいてトレードオフを考慮する事が製品設計において非常に重要と考えられます。
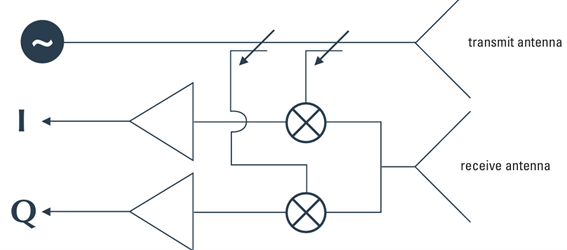
(図.4)InnoSenTレーダーフロントエンドの構成図:送信・受信用アンテナを分離した例、共有アンテナ構成は点線で示す
送信・受信アンテナを別々に設ける構成により、感度を最大化させる事が可能です。これによりミキサのアイソレーションを向上させられるメリットがある事から推奨されています(特にFMCWレーダーでは必須、後述参照)。
しかし、スペースが限られていたり、アンテナを送受共用化する必要がある場合(たとえば狭いアンテナビームパターンを必要とする場合)、受信アンテナは省略されることがあります。その際には、共通の送受信パスから受信信号をデカップリングする必要があります。
理論上、この場合受信回路に送信信号が部分的に入力されてしまいダイナミックレンジが低下します。(ダイレクトリーク、送信リーク問題)
InnoSenT社では、厚み(奥行き)が非常に薄い平面アンテナのみを提供しています。これらは個々の放射素子(レゾネータ)が長方形に配置され「パッチアンテナ」と呼ばれています。列と行の組み合わせにより、アンテナビームパターンを正確に設計・シミュレーションすることが可能です。必要な開口面積はホーンアンテナの前面開口と同等ですが、厚みは大幅に抑えられます(アンテナの詳細は第4章参照)。
またミキサ出力部に低周波帯の増幅回路(IFアンプ)を実装する構成もセオリーに適ったアプローチとして知られており、以下の3つの主要な利点が得られます:
- ミキサ出力部がデカップリングされるため、組立時における人やツールによる静電放電に対して高い耐性を持つ(旧式センサではミキサダイオードに直接アクセス可能であった)
- 外来ノイズ信号に対するシールド性(EMC)が極めて良好
- 増幅率、帯域幅、品質に関して後段の低周波アンプ段とのマッチングが最良になるため、システム雑音指数が最小化される
4.2 移動物体の検出
4.2.1 人体検出用モーションディテクタ
InnoSenT社では、カタログ製品およびカスタムフロントエンドソリューションの両方を提供しています。
たとえばカタログ品 IPS-154 は、Fig.4に示したフロントエンド構成を採用しており、以下のような仕様を有します:
- 最大10~12mの距離で移動中の人物を検出する代表的なモーションディテクタ
- 4×2 パッチ構成の送受信用アンテナを内蔵し、ビームパターンは 40×30°
- 24GHz ISMバンドで動作する固定周波数発振器
- I/Q出力を持つショットキー・ダイオード・ミキサを搭載し、移動方向の識別が可能
- 利得20dB、帯域幅数kHzの内蔵低周波プリアンプ
- センサをパルス駆動(間欠動作)して電力消費の低減を可能とするENABLE端子を実装
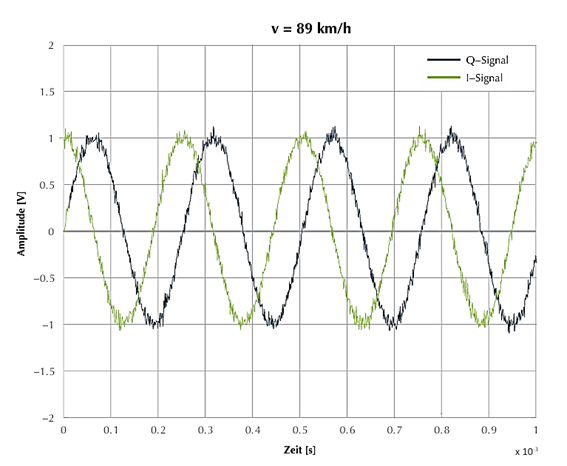
センサに+5Vを印加し、ENABLE入力をグランドに接続すれば、オシロスコープの入力に出力を接続することで、手の動きを観察可能です。生成される低周波信号は、数10mV程度の振幅になります。物体が一定方向に連続して移動している場合は、90度の位相差(I/Q)がはっきり確認できます。
(図 5)単調に移動する対象物に対するレーダーセンサ 2 I/Q出力のオシロスコープ波形例
本センサは、最先端のPHEMT発振器を利用しており、プリアンプを含めても消費電流は約40mAであり、これは従来一般的であったガン発振器型よりも大幅に低減されています。
ENABLE端子にTTLレベルのパルス信号を印加することで、電流消費はON/OFF比率に応じて低下します。ただし、ミキサ出力におけるリンギング(余振動)に注意が必要であり、高速パルス化にはサンプル&ホールド回路(3.2.3項参照)が必要です。
ENABLE端子は振幅変調用としても使用可能で、最大100%の変調深度に対応できます。最大変調/パルス周波数は約20kHzです。
訳者注)
日本国内においてはフリーラン型の固定周波数発振器の間欠駆動、パルス動作は電波法の技術要件を満たす事が難しい事から普及には至らず、この低消費向け間欠駆動のアプローチの普及は、その後のMMICソリューションの出現と廉価型フラクショナルPLLの出現を待つ事になる。近年ではMMIC単体での温度補償と周波数管理を行うICチップが登場し圧倒的な廉価化と安定した動作が可能となっている。
4.2.2 車両検出
ここで解説する車両検出の用途はその他の用途との特徴的な相違点があります。
検出対象は高い速度で移動する物体(車両)である点や
- 比較的大きなレーダー有効反射断面積(RCS)がありシステム感度を高め易い。一方で、複数の対象が重なるシーンではその識別が難しくなる
- 検出位置は定義されたエリアに明確に観測される。
その結果、以下の技術的要件が導かれます:
- 測定されるドップラー周波数が高いため、プリアンプの帯域幅は最大20kHz必要(24GHz帯において)
- ナロービーム(狭指向性)アンテナの使用が一般的
- 長距離検出の要求に対し有効なソリューションである。
代表例として IPS-144 があります。
8×4のパッチアンテナを搭載し、ビーム幅は13×25°。このセンサは、最大100mの距離で、速度250km/h(155mph)までの車両を検出可能です。パルス駆動にも対応しています。
狭指向性であるにもかかわらず、センサの全厚はわずか 11 mm(0.43インチ)であり、ホーンアンテナ構成でこのような薄型化は実現不可能です。
4.2.3 センサの付加回路
プリアンプ構成

(図.5)片チャンネル用プリアンプ回路例、利得60dB、帯域幅30kHz
検出信号を処理するためには、センサの外部にさらなる増幅段を追加する必要があります。OPアンプベースの回路が理想的であり、不要な雑音を抑えるためにも帯域制限がなされるべきです。
目安としてセンサ内蔵プリアンプも含めて総利得が70~80dB必要です。ただし、対象物が非常に近距離にある場合を除き、信号をリミットさせない構成が望まれます。
反転型・非反転型いずれの構成も選択可能であり、EMC感度を最小化するために、帰還抵抗には低インピーダンスが推奨されます。電源は+5Vの安定化・ノイズのない供給が必要です。
移動方向の識別回路
もう一つの例として、接近する物体と遠ざかる物体を識別できる回路構成が挙げられます。
先にトリガされるDフリップフロップ(CD4013)が、後続フリップフロップのリセットを行います。LED1が接近または離脱を示し、LED2が補完的に点灯します。モノフロップ(CD4528)は、ドップラー信号が消失した後、一定時間経過でLEDを消灯します。
パルス駆動
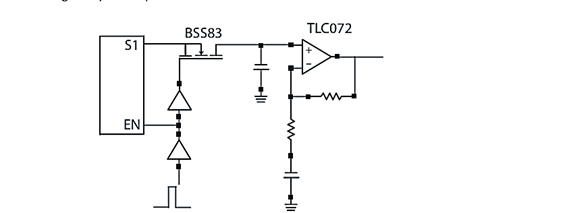
(図.6)サンプル&ホールド回路を用いたパルス駆動レーダーセンサ
センサがパルスモード(EN\端子)で動作する場合、受信信号の監視にはサンプル&ホールド回路が推奨されます。
NチャネルMOSFETのBSS83は、帰還容量が小さくサンプラーとして非常に適しています。後段の増幅およびバッファリングには、低入力電流のFET入力OPアンプ が必要です。
レーダーモジュール内蔵プリアンプの帯域幅制限により、パルス長は10µs以下に、サンプリング周波数は10kHzが標準です。
対象用途により、存在検出方式なのか速度測定なのかによって、信号処理の複雑さが決まります。
- 単純な存在検出では、信号の増幅/リミット処理としきい値判定だけで十分です。
単純な在所検出(プレゼンスディテクション)の場合には、信号の増幅/リミッタ処理としきい値比較だけで十分ですが、誤動作を防ぐためには、警報を出すために最低限の周期数を必要とするべきです。これは、例えば建物への設置時に小動物や鳥などによる誤検出を避けるためです。
速度測定は、技術的な工夫を加えることで十分に可能です。単一の対象物だけを扱う場合には、ドップラー信号の「ゼロクロスカウント(零交差点数のカウント)」だけでも対応できるかもしれません。積分時間が長ければ長いほど、結果の精度は高くなります。
一方で、複数のターゲットが存在する場合には、もはや単純な方法では対応できません。このような場合には、A/D変換を用いたデジタル信号処理と、続くFFT(高速フーリエ変換)が必要になります。なぜなら、「ゼロクロスカウント」では正しく認識できないか、明らかに大きな誤差を生じることになるためです。
4.3 静止物体の検出
4.3.1 対応モジュールの動作
完全に静止した物体は、FMCW方式を用いたレーダーモジュールによってのみ検出可能です。
この方式では、マイクロ波発振器が周波数を一定周期で単調にスイープできるVCO(電圧制御発振器)である必要があります。最も単純な時間関数として、線形チャープが使用されます。
FMCW対応モジュールの代表例がInnoSenT社 IVS-148です。以下の要素が含まれています:
- バラクタダイオードによる周波数可変式送信発振器
- 移動方向検出用I/Q出力を持つ2チャンネル ショットキーダイオードミキサ
- 利得20dB、帯域幅10kHz の内蔵低周波プリアンプ
- 8×4パッチアレーで構成され、指向角15×30°の送受信分離型アンテナ構成
- 低雑音動作のための内蔵マイクロ波アンプ
この構成では、送信・受信経路を分離することが必須であり、これにより送受信アイソレーションの最大化を実現します(次項参照)。
4.3.2 外部回路と信号処理
バラクタ愛オードを駆動する際には、その内部回路構成を理解する必要があります。
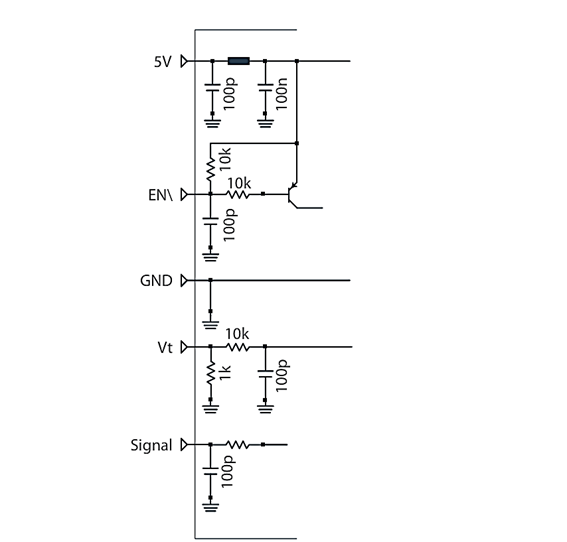
チューニング入力ポート(Vt)に接続された直列抵抗は、逆器電流のようなトラブル発生時に電流整流器として機能します。一方、並列抵抗はEMCに対するパフォーマンスの最大化を果たします。これら両方の素子は、内部並列コンデンサとともに最大変調周波数を決定します。
I/Q出力まわりの回路構成は、従来型のドップラーレーダーとよく似ています。測定される信号周波数も、ドップラー装置と同じ帯域内に存在します。
可変容量ダイオード(バラクタ)の電圧を固定すれば、このモジュールは純粋なCWドップラーセンサとして動作させることができ、この機能によって装置はマルチモードセンサとして使用可能になります。
重要な点として、FMCW動作中においては、変調スイープ信号が受信出力に現れ、オシロスコープ上で簡単に観測できるということがあります。これにより、送信・受信間の十分なアイソレーション(分離性能)が非常に有利である理由が明らかになります。アイソレーションが悪いと、変調波の影響が受信信号に混入するためパフォーマンス低下の原因となります。
小さな物体を検出するためには、目的の信号成分を、復調された不要な変調信号からフィルタリングによって正確に取り出す必要があります。FMCWレーダーでは、変調信号の周波数と、物体から得られた測定信号の周波数が同程度の帯域に入ってしまった場合には分離が出来なくなり、これが技術的な限界となる場合があります。
ただし、この現象は、周波数変調幅および変調指数に依存します。たとえば、欧州では24GHzのISMバンドでは最大で約250MHzの変調幅が許容されています(帯域限界へのマージンを考慮すれば、200MHz程度が現実的です)。
編者注) 日本では許容帯域幅は200MHzです。
これらの事実から計算すると、24GHzのFMCWレーダーでは、分解能や最小測定可能距離は、約1.5メートル(または5フィート)が理論限界となっています
ここでいう「最小測定距離」というパラメータは、「精度(accuracy)」とは異なる点に注意が必要です。精度については、長時間の積算処理によってミリメートル単位や1/10インチ単位にまで向上させることが可能です。